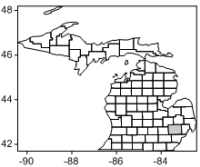
Base Map(ベースマップ)は、マップの境界を表示します。ポリゴン、ポリライン、3Dポリゴン、3Dポリライン、3Dポリメッシュオブジェクト、点、テキスト、画像、メタファイルを含めることができます。ベースマップを他のマップレイヤと重ねることで、道路や建物、河川や市街の位置、データなしの領域といった詳細な情報を表示できます。ベースマップは、ベクターファイル、画像、データファイルから作成できます。空のベースマップを作成して他のマップと重ね、テキストなどのオブジェクトを表示するためだけに使用することもできます。
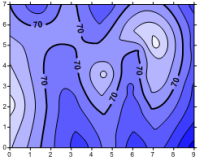
Contour Map(等高線マップ、等値線マップ、コンターマップ)は、3次元データを2次元で表現したものです。等高線は、マップ内でZ値が等しい線を定義し、表面の形状を等高線で表現します。等値線、コンターとも呼びます。等高線マップでは、等高線とその間の塗りつぶし色またはパターンを表示できます。等高線の間隔と範囲は、線形、対数、カスタムのいずれかを使って表示できます。
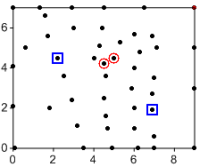
Post Map(ポストマップ、分布図)は、マップのデータの位置を表示します。マップ上の各データのシンボルやテキストを編集可能で、複数のラベルを表示することもできます。分類クラスを定義して、クラスごとにシンボルプロパティを変更できるクラス化ポストマップも作成できます。

3D Surface Map(3Dサーフェスマップ、曲面図)は、グリッドファイルの3Dカラー表現です。色、ライト、メッシュなどを設定できます。複数のサーフェスマップをレイヤー化してブロックダイアグラムを作成することができます。
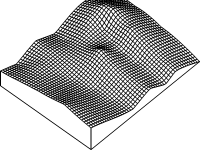
3D Wireframe Map(3Dワイヤーフレームマップ、曲面線図)は、グリッドファイルの3D表現です。ワイヤーフレームは、定数XとYの線に沿ってZ値を接続することによって作成されます。
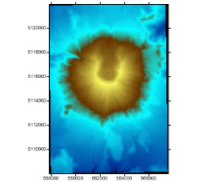
Color Relief Map(カラー起伏図、カラーレリーフマップ)は、グリッドファイルのZ値に基づいた色を割り当てたラスターイメージです。空白領域は、別の色または透明な塗りつぶしとして表示されます。ピクセルを補間して滑らかな画像を作成することができます。陰影を適用して、奥行きと外観を向上させることができます。
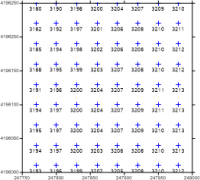
Grid Values Map(グリッド値マップ)は、地図上のグリッドノード位置にシンボルとラベルを表示します。ラベルおよびシンボルの密度は、XおよびY方向に独立で制御できます。シンボルの色は、値によって変えることができ、特定の範囲の値に対してのみシンボルやラベルを表示できます。また、グリッド線を追加することもできます。
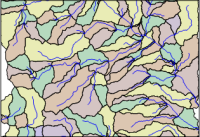
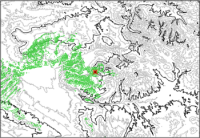
Watershed Map(流域マップ、流域図)は、流域と河川にグリッドを分割し、水がグリッドを横断して流れる方向を表示します。流域に色を割り当てたり、線プロパティを河川に関連付けることができます。また、凹地を塗りつぶして除去することができます。
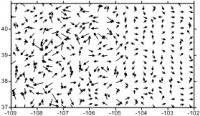
Vector Map(ベクトルマップ)は、各位置での方向、強度データを矢印で表現します。マップ上の任意のグリッドノードで、矢印は最急降下の下り方向を指し、矢印の長さは勾配の大きさに比例します。ベクトルマップは1つのグリッドファイル(数値的に計算された勾配)か、2つの異なるグリッドファイル(ベクトルの成分を与えるグリッド)の情報から作成されます。

Point Cloud Map(ポイントクラウドマップ/点群マップ)は、LAS/LAZデータをXY位置のポイントとして表示します。ポイントクラウドマップを作成する際には、LAS/LAZデータは複数のファイルを結合でき、さまざまな基準でフィルタリングできます。標高、強度、戻り値、または分類によりポイントを色付けます。ポイントクラウドレイヤでは、ポイントの変更、分類、およびエクスポートのコマンドが用意されています。ポイントクラウドレイヤは、3Dビューに三次元表示できます。
Viewshed Layer(可視領域マップ)は、トランスミッター(送信機)の位置から見える(または見えない)マップの領域を強調表示します。サーフェス上の送信機、レシーバー(受信機)、障害物の高さは指定できます。すべての2Dグリッドベースのマップに可視領域マップを追加できます。また、傾きなし(90度)および正投影表示の3Dサーフェスマップに追加することもできます。
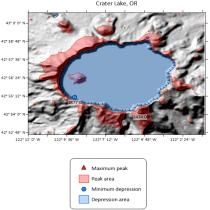
Peaks and Depressions Map(峰と凹地マップ)は、地形データ、カルスト地形、地理データから得られた地表水と地下水の量を、Surferのグリッドファイルに取り込み作成します。水が流れ出るピーク(峰)と、水を取り込むディプレッション(凹地、窪地)の周りに境界線を引くことで、統計分析のための領域を作成することができます。
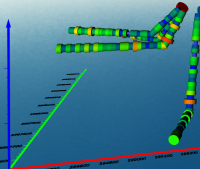
Drillhole Map(ドリルホールマップ)は、ボアホール、ドリルカラー、測量、間隔、ポイントデータから作成できます。2Dドリルホールレイヤは、各ホール・コア・井戸の位置、ゆがみ、経路を示します。ドリルホールマップは3Dで表示することもできます。ホールIDまたはデータの他の属性ごとに個別のシンボルを定義して、ドリルホールの凡例を作成できます。
上記の他にも、プロファイル(断面図)や円グラフマップなどを作図することができます。

ISO27001(ISMS)認証
情報セキュリティ・マネジメントシステム

© 2026 Lightstone Corp. All Rights Reserved
